Zeitgenössisches UUV-Propulsor-Design


Unter dem Gesichtspunkt der Fahrzeugantriebsphysik unterscheidet sich ein unbemanntes Unterwasserfahrzeug (UUV) kaum von Ihrem persönlichen Skiboot oder einem Tanker. Es teilt sich das Modell des Schiffs-Propulsor-Antriebssystems, mit dem ein Propulsor Antriebsenergie in Schubkraft umwandeln kann, um ein Schiff zu bewegen. Die Grundprinzipien des Schubgleichgewichts und der Bewegung sind allen drei gemeinsam, ebenso wie die Umsetzung der Rotationsenergie in Axialschub durch das zentrale Element des Systems - den Propulsor.
Nicht für verschiedene Fahrzeugtypen gelten die Einschränkungen und Konstruktionsziele, die für die Mission jedes Fahrzeugs einzigartig sind. Zum Beispiel kann ein Skiboot bei Zuggeschwindigkeiten einen hohen Schub erfordern und ist bereit, die potenzielle Höchstgeschwindigkeit aufzugeben, um diese Missionsanforderung zu erreichen. Das Übersetzungsverhältnis und die Propellereigenschaften sind für diesen Zweck ausgelegt. Ein Tanker braucht möglicherweise die höchste Effizienz bei der "Geschäftsgeschwindigkeit", um die größte finanzielle Rendite zu erzielen. Oder es kann zusätzlich eine Einschränkung für Emissionen oder Kraftstoffreduzierung haben, was einen Kompromiss bei der Konstruktion des Propellers erfordert.
Unterwasserfahrzeuge haben einen eigenen Satz von Propulsor-Konstruktionsanforderungen in Bezug auf ihre verschiedenen Aufgaben, wie z. B. die Lebensdauer der Batterie (oder die größte zurückgelegte Entfernung für das Batteriebudget), den maximalen Körperdurchmesser, die minimale Betriebsgeschwindigkeit, die Berücksichtigung der Ummantelungen oder Düsen hinsichtlich der hydrodynamischen Effizienz oder der Sicherheit Propellerkontakt oder Geräuschminderung, um einen leisen Betrieb zur Datenerfassung sicherzustellen. Dies ist die Kulisse für unsere UUV-Propulsor-Designarbeit bei HydroComp und beginnt mit einem Kundeninterview, um die wirklich wichtigen Informationen für ein erfolgreiches Designprojekt zu sammeln. Das Vessel-Propulsor-Drive-Modell ist ein guter Rahmen für solche Diskussionen.
Schiff
Die typische UUV ist eine Rumpfform mit Rotationskörper (auch als Axisymmetrische Form bezeichnet), die eine Nase, einen Körper und einen Schwanz aufweist. Einige Fahrzeuge verfügen über eine sehr kurze Nase und ein sehr kurzes Heck. Wie zu erwarten, gibt es eine gewisse Widerstandsstrafe für eine stumpfe Nase und eine Antriebsstrafe für den Fluss in den Propulsor, die nicht axial, sondern entlang eines steilen Abhangs verläuft. Ein Teil unserer Arbeit besteht darin, den unterschiedlichen Teil des Widerstands - Wellenerzeugung oder Druckwiderstand im Vergleich zum Reibungs- oder Viskositätswiderstand - auszugleichen, um den geringsten Widerstand im Verhältnis zum Volumen zu erzielen. Das stimmt eigentlich nicht ganz. Wir wollen wirklich ein Minimum an Power-to-Volume-Ergebnis, und die Heckgeometrie wird die Fähigkeit des Antriebs beeinflusst, aus der Rotationsenergie einen nützlichen axialen Schub zu entwickeln.
Viele Propulsor-Design-Projekte beginnen daher mit der Vorhersage der Widerstands- und Rumpf-Propulsor-Koeffizienten eines Fahrzeugs (Wake-Fraction- und Schub-Abzug) unter Verwendung der NavCad®-Software für die Simulation von Hydrodynamik- und Antriebssystemen. Ein spezielles Tauchfahrzeugmodul bietet robuste Vorhersagemöglichkeiten für torpedoförmige UUV-Rumpfformen.
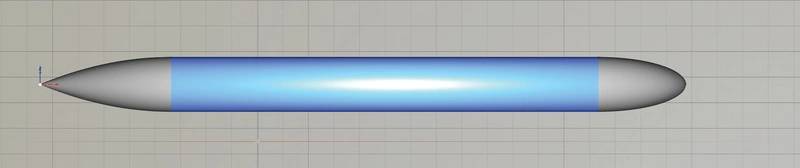 Bild: Hydrocomp- Laufwerk
Bild: Hydrocomp- Laufwerk
Auf der anderen Seite des Propulsors befindet sich der Antrieb, bei dem es sich typischerweise um einen Elektromotor handelt. Motoren unterscheiden sich in ihren elektrischen Eigenschaften, aber die kritischen Daten für die Konstruktion des Antriebs sind die mechanische Ausgangsleistungs-Drehzahl-Kurve an der Welle. Die "stromaufwärtige" elektrische Eingangsleistung ist natürlich wichtig und liefert eine betriebliche Einschränkung. Wir charakterisieren die elektrische Eingangsleistung anhand der Motorwirkungsgrad-Kurve. Dies hilft bei der Beantwortung der Frage: Was ist unser optimaler Ziel-Drehzahlbereich, wenn die höchste Akkulaufzeit die höchste Priorität hat? Auf der anderen Seite ist es die Leistungs-RPM-Kurve der Welle, die uns die Drehzahl für die maximal mögliche Wellenleistung und zusätzlich die Drehzahl für den maximalen Schub und die Fahrzeuggeschwindigkeit angibt.
Wie Sie anhand der repräsentativen Motorkurven von Wellenleistung und elektrischem Wirkungsgrad in Abhängigkeit von der Drehzahl ablesen können, tritt die höchste potentielle Leistung (wenn überhaupt) selten bei der höchsten elektrischen Eingangsleistung auf. Daher müssen wir den RPM-Designpunkt häufig als Kompromiss definieren, der weder die höhere Ausgangsleistung noch den besten elektrischen Wirkungsgrad ergibt.
Für jede Diskussion über motorbetriebene UUVs ist auch relevant, dass die Drehzahl der Welle fast immer wesentlich zu hoch ist, um einen optimalen Antrieb des Antriebs zu gewährleisten. Es ist nicht ungewöhnlich, eine Art von Getriebe zu sehen, um die beste Leistung des Antriebs zu erreichen - oder zu akzeptieren, dass der Antrieb mit mäßiger Effizienz arbeitet.
Propulsor
Sie werden die Verwendung des Begriffs "Propulsor" anstelle von "Propeller" bemerken. Damit soll das Konzept untermauert werden, dass eine Düse und ein Propeller (wie bei den meisten UUVs auch als "Triebwerk" bezeichnet) eine interaktive Einheit, der Propulsor, ist. Propulsordesign ist eine Kombination aus dem Finden des besten Propellers und der besten Düse (auch Kanal oder Mantel genannt), während deren Zusammenspiel verfolgt wird. Mit anderen Worten, Sie müssen Entwurfswerkzeuge verwenden, die diese Interaktion enthalten, z. B. NavCad für die Systemmodellierung oder PropElements® für die Konstruktion von Propeller-Düse-Komponenten.
Bei allen UUV-Propulsor-Designprojekten besteht ein universelles Ziel darin, eine Geometrie zu entwickeln, die das höchste Schub-zu-Leistung-Verhältnis (ihre Effizienz) erzeugt, das wir mit etablierten Verfahren erreichen. Es ist im Allgemeinen der Einfluss von externen Designtreibern, die ein erfolgreiches UUV-Propulsordesign so schwierig machen können. Zum Beispiel kann die Drehzahl zu hoch sein (wie oben erwähnt). Geometrische Beschränkungen können den maximalen Durchmesser begrenzen (um sicherzustellen, dass er innerhalb des Karosseriedurchmessers bleibt) oder sie können die Konstruktion beeinflussen, um die Neigung des Fahrzeugheckteils zu berücksichtigen.
Es ist wichtig, sich einen Moment Zeit zu nehmen und die Auswirkungen der Herstellung von UUV-Antrieben zu erwähnen. In der Presse wird viel über die additive Fertigung (AM) für Propeller diskutiert. Obwohl dies aus finanzieller Sicht und hinsichtlich der Zustellbarkeit attraktiv sein kann, müssen wir dafür sorgen, dass die Leistung nicht durch unangemessene Oberflächentextur (die einen großen Einfluss auf den Antrieb der geringen Größe haben kann, der bei den meisten UUVs gefunden wird), Ermüdungsfestigkeitsfehler oder durch Beeinträchtigungen beeinträchtigt wird hydroelastische Biegung in der Klinge. HydroComp hat in verschiedenen internen Forschungsprojekten erfolgreiche Verfahren für den Einsatz von AM für kleine Antriebe entwickelt.
Abgesehen von diesen praktischen Überlegungen zum Thema Design, ist einer der interessantesten zeitgenössischen Designtreiber das Thema Schallabstrahlung. Im Rahmen einer umfassenderen Nachhaltigkeitsinitiative hat HydroComp Know-how in der Vorhersage und Minderung der Hydroakustik von Antrieben (der Begriff, der Lärm und Vibration erfasst) entwickelt. Dieses Wissen wird auch anderen Marinearchitekten und -ingenieuren zur Verfügung gestellt, da neue hydroakustische Funktionen für unsere Werkzeuge entwickelt werden. Die Lärmempfindlichkeit eines Projekts ist jetzt immer Teil der Diskussion mit unseren UUV-Propulsor-Design-Engineering-Kunden.
Alle hydroakustischen Anregungen beruhen auf Massenschwankungen (der periodischen Bewegung der fluiden Masse). Die hydroakustische Antriebskraft des Propulsors wird im Allgemeinen durch Schwankungen in den Niederdruckzonen des Propellers verursacht, wenn dieser sich in „abgeschatteten“ Bereichen wie hinter einer Strebe oder einer Steuerfinne dreht. Ein Teil der Fluktuation beruht einfach auf der Änderung der Strömungsrichtung um die Klinge herum, die durch den variierenden Einstrom verursacht wird, aber noch deutlicher durch die schnelle Ausdehnung und den Zusammenbruch der Kavitation auf der Klinge. Jedes dieser Elemente wird als Teil unseres Propulsordesigns bewertet, wobei die erforderlichen Änderungen durch Änderungen der Kontur der Schaufel und der Verteilung der Wölbung erforderlich sind.
Übermäßige hydroakustische Erregung - und Transmission - kann auch mit einem kreativen Düsendesign unterstützt werden. Auf der Grundlage unseres Hintergrunds in der Düsenleistungsmodellierung können wir prüfen, ob eine bestimmte geräuschdämpfende Düsengeometrie die notwendige Unterdrückung sowie einen Verlust an Antriebsleistung bieten kann.
Während das UUV-Propulsor-Design seine Sammlung einzigartiger Herausforderungen hat, ist es immer noch eine Teilaufgabe innerhalb eines größeren Systemproblems. Es kann eine zufriedenstellende technische Herausforderung darstellen, die mit etwas Sorgfalt, geeigneten Werkzeugen und praktischer Erfahrung erfolgreich abgeschlossen werden kann.
Über den Autor
 Donald MacPherson, der Autor.
Donald MacPherson, der Autor.
Donald MacPherson, ein führender Spezialist für die Simulation von Antriebssystemen, ist der technische Direktor von HydroComp und beaufsichtigt alle Softwareentwicklungs- und Entwicklungsdienstleistungen. Er ist ein Absolvent des Webb Institute, Fellow von SNAME und Mitglied des Propulsion Hydrodynamics-Panels.
Das Eis brechen in der Arktisforschung

Tiefer graben: Herausforderungen und Trends in der Baggerindustrie

Die Saat der Inspiration säen: Seegras-Wiederherstellung

Von der Unsicherheit zum Vorteil: WHOI startet neue Initiativen für Industriepartner

O-Ring-Dichtungskonstruktion, Teil 2: Radialdichtungen für Außendruck
")
Skalierung der unbemannten Flotte: Von einzelnen Schiffen bis hin zu Operationen auf Systemebene

Forschungsteam des Schmidt Ocean Institute entdeckt 31 neue Arten

AUKUS entwickelt unbemannte Unterwasserfahrzeuge, Auslieferung geplant für 2027

Vard erhält Rekordauftrag über 800 Millionen Dollar für Tiefseeforschungsschiff
")
Ørsted und PGE errichten erste Fundamente für den Offshore-Windpark Baltica 2 in Polen.
-170484 "(Bildnachweis: Van Oord)")
MTR100: Profiling führender Unternehmen der Unterwassertechnik – Bewerbung geöffnet

Nordatlantische Glattwale verzeichnen in dieser Kalbungssaison die höchste Geburtenzahl seit 2009
-mit-der-170206 "Nordatlantischer Glattwal „Millipede“ (Katalognummer 3520) mit ihrem Kalb in der Cape Cod Bay am 9. April 2026. Bildnachweis: New England Aquarium, aufgenommen mit Genehmigung der NOAA (Nr. 25739-01).")