Robotik: Die nächste Generation von Unterwasserfahrzeugen

Das MUM-Konzept von Thyssenkrupp. Bild von Thyssenkrupp.

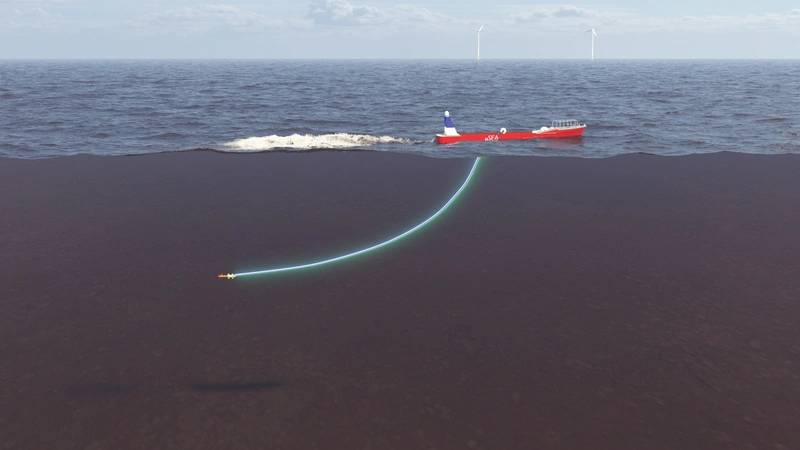
Die uLARS-Oberflächen-Drohne der USA. Bilder von der USA.
MUMs (und Töchter) der Erfindung: Meeresnymphen und MUMs inspirieren eine neue Generation von Unterwassersystemen und -fahrzeugen. Elaine Maslin sieht sich um.
Die Liste der Bewerber für den Eintritt in die Unterwasserwelt wächst rasant. Die Konzepte variieren von autonomen Unterwasser-Mutterschiffen, die in der Lage sind, eine Reihe von Nutzlasten über große Entfernungen zu transportieren, bis hin zu Schwärmen von auf dem Meeresboden stationierten Knoten, die ihren Weg zu vorprogrammierten Orten finden können.
Bei energy: connected, wie der in Oslo ansässige Cluster Subsea Valley und die Jahreskonferenz nun genannt werden, wurden einige dieser Konzepte vorgestellt, darunter die von zwei norwegischen Technologieunternehmen und dem deutschen Unternehmen Thyssenkrupp, das eher mit dem Entwurf von U-Boot-Schiffssystemen vertraut ist.
uSEA enthüllt uLARS
Das norwegische Technologie-Start-up uSEA schlägt ein Hybridsystem vor, um den Betrieb von bemannten Schiffen über eine Kombination aus Unterwasser- und Oberflächendrohnen zu unterbrechen.
Die uSEA wurde 2017 gegründet und entwickelt seitdem eine Oberflächendrohne oder ein unbemanntes Oberflächenschiff (USV) zur Unterstützung von Unterwasserdrohnen (dh autonomen Unterwasserfahrzeugen oder AUVs), sodass bemannte Schiffe nicht mehr benötigt werden und die Batterie aufgeladen werden kann im Wasser durchgeführt, um Start- und Bergungsarbeiten zu vermeiden. Dies unterscheidet es von anderen Oberflächen-Drohnen-Konzepten, bei denen das AUV oder das ferngesteuerte Fahrzeug (ROV) zum Wiederaufladen in der Regel vollständig wiederhergestellt werden müssen. Das System von uSEA heißt uLARS (LARS = Launch and Recovery System) für Unterwasserdrohnen, sagt Felipe Lima, CEO von uSEA, der vor seiner Tätigkeit bei Subsea 7, Aker Solutions und Xodus Group in der brasilianischen Marine tätig war.
Es ist eine natürliche Entwicklung. Die heutigen AUVs werden immer leistungsfähiger und zuverlässiger, sagt Lima. „Sie nehmen den Raum ein, der der Hinterhof von ROVs war. Aber sie haben eine Einschränkung; Sie sind auf Batterien angewiesen, da sie nicht wie ROVs verkabelt sind und weiterhin ein Mutterschiff benötigen, z. ein Vermessungsschiff, weil ihre Batterien in 12-48 Stunden leer sind. Mit einer mobilen Dockingstation für das AUV sind Sie nicht auf eine Dockingstation am Meeresboden angewiesen und benötigen kein größeres Überwasserschiff. “
 uLARS-Unterwasser-Docking-Schnittstelle der USA (Bild: USA)
uLARS-Unterwasser-Docking-Schnittstelle der USA (Bild: USA)
Das System enthält einen abtauchbaren Schleppkopf mit einem induktiven Anschluss zum Laden und zur Datenübertragung, der ein wenig wie das Betanken von Kampfjets in der Luft funktioniert. „Das bedeutet, dass Wellen nur minimale Auswirkungen haben, da das Andocken in einer kontrollierten Tiefe erfolgt“, sagt Lima, der einen MSc in Subsea Engineering von der Universität Aberdeen und einen MSc in Innovation und Unternehmertum von der Universität Oslo besitzt. Es gibt auch ein durch Mond Pool-basiertes Handhabungssystem für die sichere Bergung des AUV an Deck.
Das System wird die Unterwasservermessung in flachen Gewässern sowie in tiefen und ultratiefen Gewässern unterstützen und eine Vielzahl von Nutzlasten betreiben, die von konventionelleren Typen wie Side-Scan-Sonar und Mehrstrahl-Echolot bis hin zu fortgeschritteneren wie Sonar mit synthetischer Apertur reichen.
Die uSEA sucht Partner, um das Qualifizierungsprogramm abzuschließen, das Ende nächsten Jahres (2020) erwartet wird. Danach konzentriert sich das Unternehmen auf Operationen auf See und sucht nach Pilotprojekten, die im Jahr 2021 durchgeführt werden sollen.
Ein iDROP im Ozean
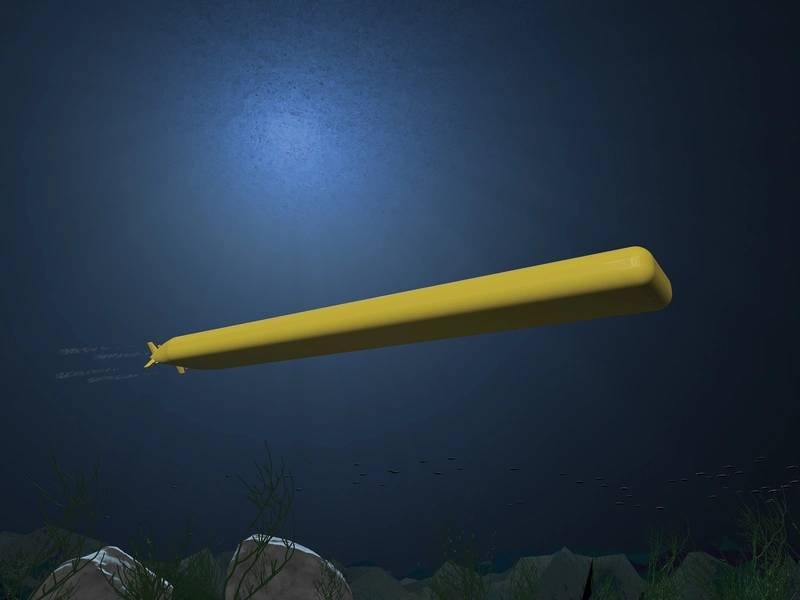
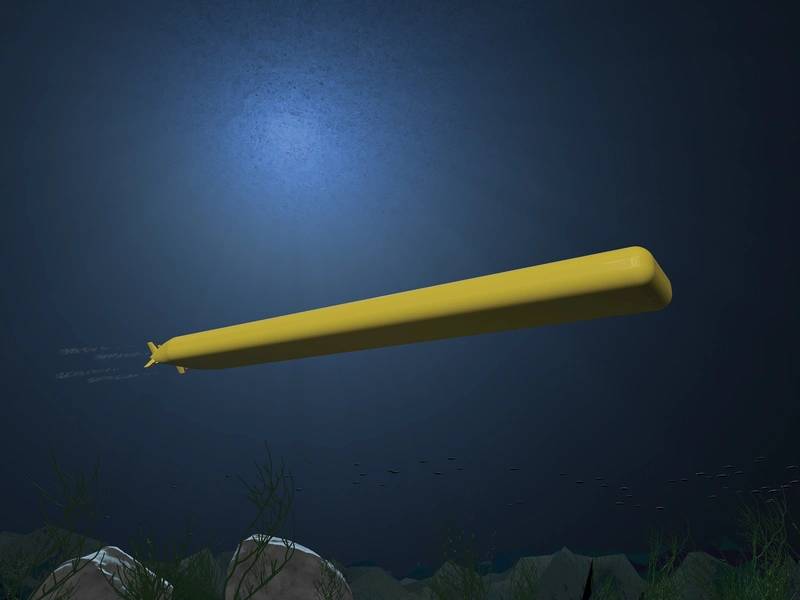
Ein weiteres norwegisches Technologieunternehmen, iDROP, plant, den Markt für seismische Bodentechnologie mit seinen autonomen Knotenpunkten in Oceanid zu stören. Das iDROP-System basiert auf einzelnen zylindrischen Sensorknoten (benannt nach den griechischen Meeresnymphen), die mithilfe von Schwerkraft und Ballastverschiebung zum Antrieb und zur Positionskontrolle eingesetzt werden, um an bestimmten vorher geplanten Positionen auf dem Meeresboden zu landen und dort auf Aluminiumbeinen zu landen herausspringen, bevor sie landen.
 Eine iDROP's Oceanid. In der griechischen Mythologie sind Ozeaniden Nymphen, die die 3000 Töchter der Titanen Oceanus und Tethys waren. (Bild: iDROP)
Eine iDROP's Oceanid. In der griechischen Mythologie sind Ozeaniden Nymphen, die die 3000 Töchter der Titanen Oceanus und Tethys waren. (Bild: iDROP)
Die Idee ist, dass sie in Gruppen eingesetzt werden können, um auf dem Meeresboden Gittermuster für seismische Vermessungen zu bilden. Bordbatterien versorgen die Abstiegskontrolle (mit nur 5% der Batterie), die Datenerfassung (für 180 Tage) und lösen einen Mechanismus aus, der den 30 kg schweren Ballast aus Salzschlamm freisetzt, sodass die Einheiten zur Oberfläche zurückgleiten können. wieder unter Kontrolle, so zielen sie auf ein erwartetes Ziel. Ein Oberflächensystem mit einer schwimmenden Förderbandanordnung würde sie dann sammeln. "Es gibt eine Vielzahl von seismischen Erfassungstechnologien, die hauptsächlich abgeschleppt werden", sagt Kyrre J Tjøm, Gründer und CEO von iDrop, der zuvor bei Schlumberger gearbeitet und für beraten hat Equinor und Seabed Geo Solutions. „Es gibt auch Knoten, die von einem ROV auf dem Meeresboden platziert werden. Es gibt andere, wo Sie sie mit Betonballast und einigen angetriebenen Alternativen über die Seite werfen. Unser System macht große Spezialschiffe mit schweren Umschlagmaschinen und zeitaufwändigen ROV-Vorgängen überflüssig. “
Gruppen von Ozeaniden können schnell eingesetzt werden, und die Granularität der Sensorpunkte (dh die Flächendeckung und damit die Menge der abzurufenden Daten) kann erhöht werden, sagt er. Dies ist 69 Grad vertikaler autonomer seitlicher Verschiebung zu verdanken, wobei jeder Knoten in eine voreingestellte Position „fällt“. „Wenn Sie einen Sensor in 1200 m Wassertiefe einsetzen möchten, können Sie 2 km vom Oberflächenschiff entfernt einen Sensor anstelle einer Linie installieren“, sagt er.
Nach Angaben von Tjøm könnten Chargen von neun Knoten mit je einem induktiven Modem, einem Transponder und einer Nutzlast von seismischen Sensoren in 15 Minuten bereitgestellt werden. Dies spart zehnmal mehr Zeit als bei herkömmlichen Methoden. Ein digitaler Zwilling, der auf erweiterten Modellierungs- und Testverfahren basiert, wird verwendet, um mögliche Auswirkungen auf die Umwelt zu identifizieren, z. Wellen, Strömung, Tiefe usw. und ermöglichen somit die Kontrolle des Abstiegs.
„Wir wollen die Art und Weise revolutionieren, in der Meeresbodenknoten auf dem Meeresboden installiert werden“, sagt Tjøm. „Die Wettbewerber machen 40-170 pro Tag und benötigen zwei ROVs, DP-gesteuerte Knotenhandhabungssysteme, ein großes Schiff und eine spezialisierte Besatzung. Je tiefer Sie fahren, desto langsamer werden die ROVs, da sie mehr Schub benötigen, um die Nabelschnur zu ziehen. Wir würden mit einer normalen Schiffsbesatzung weniger als 1000 pro Tag machen. “
Hinter den Kulissen wurde viel Arbeit in das Oceanids-Projekt gesteckt, und erst jetzt wird die Technologie gefördert. Tatsächlich startete das Projekt 2010 mit einem 2013/14 gebauten Prototyp. iDROP hat auch ein Wiederherstellungssystem erstellt und einen In-Shore-Test durchgeführt, um das Wiederherstellungssystem zu verifizieren. In diesem Jahr ist ein zweiter Pilotversuch in der Nordsee geplant, bei dem seismische 3D-Daten in der Tiefsee erfasst werden. Neun Fahrzeuge wurden gebaut und sollten im ersten Halbjahr zu Testzwecken vor der Küste fahren. Weitere sollen im kommenden Jahr gebaut werden.
Mama ist das Wort
Thyssenkrupp Marine Systems (MS), Teil des deutschen Industriekonzerns, arbeitet in einem anderen Maßstab als die USA und die USA. Die Firma entwirft ein sehr großes (bis zu 50 m langes) unbemanntes Unterwasserfahrzeug (UUV), das als modifizierbares Unterwasser-Mutterschiff (MUM) bezeichnet wird und auf einem modularen Design basiert, das Basis- und Missionsmodule umfasst.
Dahinter steckt der Gedanke, dass der Unterwasserfahrzeugmarkt von heute von spezialisierten Produkten dominiert wird und kein Fahrzeug für mehrere Aufgaben eingesetzt werden kann. Deshalb hat Thyssenkrupp ein modulares System entworfen, sagt Willem Hendrik Wehner, der das Projekt bei Thyssenkrupp MS überwacht.
 Thyssenkrupps MUM-Konzept (Bild: Thyssenkrupp)
Thyssenkrupps MUM-Konzept (Bild: Thyssenkrupp)
Grundmodule wären Trimm- und Tauchsysteme, Batterie, Antrieb und eine Wasserstoff-Brennstoffzelle. Dann könnten missionsbezogene Module vom Einsatz von seismischen Knotenpunkten (Ocean Bottom Seismic Nodes, OBN) (> 1000 OBNs) bis hin zu Kernbohrsystemen reichen oder vom Wechsel des Unterseesteuerungsmoduls zur Unterbringung von ferngesteuerten Fahrzeugen, die das große UUV als Mutterschiff nutzen würden. Ein MUM-Baukasten würde aus Modulen bestehen, die die Größe von Standardcontainern von 20 Fuß oder 10 Fuß haben. Sie können je nach Einsatzspezifikation zu ganz unterschiedlichen Fahrzeugen kombiniert werden, von 80 Tonnen bis über 300 Tonnen, oder von 20 m Länge, 4 m Breite und 3 m Höhe bis zu etwa 50 m Länge, 7 m Breite und 3 m Höhe. hoch, wobei der Stromverbrauch von der Nutzlast und der Antriebsgeschwindigkeit abhängt.
„Andere Unterwasserfahrzeuge haben modulare Ansätze, aber hauptsächlich im Hinblick auf eine Anpassung des Nutzlastabschnitts oder eine Verlängerung der Lebensdauer durch Hinzufügen von mehr Energiekapazität“, sagt Wehner. "Ein gutes Beispiel ist das SeaCat AUV von ATLAS, das seine Nutzlast durch Tauschen des Fahrzeugkopfs ändern und die Reichweite durch Hinzufügen von mehr Batteriekapazität erweitern kann."
Laut Wehner könnte das MUM-Fahrzeug je nach Fahrzeugkonfiguration Hunderte von Kilometern zurücklegen, und zwar mit einer Leistung von 80 bis 160 kW in einer Wassertiefe von bis zu Tausenden von Metern. „Die Unterwasserreichweite ist skalierbar und liegt im Bereich von 100 Seemeilen. Für die aktuellen Anwendungsfälle völlig ausreichend “, sagt er. „Unser Gasspeichersystem für die Brennstoffzelle ist Batterien in Bezug auf Energie pro Volumen und noch mehr in Bezug auf Gewicht etwa dreimal überlegen. Wenn Sie jedoch mehr als 1000 Seemeilen zurücklegen möchten, empfehlen wir einen oberflächennahen Transit mit einem konventionelleren, z. B. dieselelektrischen Ansatz. Das Konzept sieht das vor. “
Wasserstoff-Brennstoffzellen sind eine bewährte luftunabhängige Technologie für Thyssenkrupp-U-Boote. Das Unternehmen verfügt über umfangreiche Erfahrungen mit Wasserstoff-Brennstoffzellen im deutschen U-Boot HDW Klasse 212A sowie in anderen U-Booten. Für die Spitzenlast einiger Nutzlasten könnten Batterien erforderlich sein, die meisten aktuellen MUM-Fahrzeugkonstruktionen verfügen jedoch nur über eine kleine Ersatz- / Notfallbatterie, so Thyssenkrupp. Derzeit wird ein Modul für den oberflächennahen oder oberflächennahen Transport entwickelt, da das Brennstoffzellensystem seine Stärken für dauerhafte Unterwasseraufgaben besitzt.
Thyssenkrupp MS ist bestrebt, für die Kommunikation über große Entfernungen auf langen Missionen selbstfahrende Modems oder autonome Kommunikationsknoten mit bidirektionaler Datenübertragung zu verwenden, um über eine Kette dieser Knoten auch eine akustische Kommunikation über große Entfernungen zu ermöglichen lokale Navigation oder 3D-Positionierung über USBL-Modems. Diese werden im Rahmen eines Teilprojekts namens NaviMUM von EvoLogics entwickelt und sollen von einem Revolvermagazin auf der MUM bereitgestellt werden.
EvoLogics nennt das Konzept ein selbstorganisierendes mobiles Unterwassernetz, bei dem die Knoten Relaisstationen bilden und die Positionierung übernehmen. Sie fächerten sich autonom in einem Missionsgebiet auf, analysierten die Kommunikationsumgebung, hielten die Position und verbanden sich zu einem flexiblen Unterwassernetz. Einige hätten einen GNSS-Empfänger, um periodisch echte Positionskorrekturen zu erhalten, sagt Wehner.
„Gerade bei sehr großen Fahrzeugen wie dem MUM sind starke Sensoren und Algorithmen für die autonome Vermeidung von Hindernissen und die Umplanung von Strecken erforderlich“, sagt Thyssenkrupp. „Selbsteinstellende Regelalgorithmen, die die große Vielfalt möglicher Fahrzeugkonfigurationen widerspiegeln, werden das Fahrzeugkonzept unterstützen. Das Projekt entwickelt ein mobiles Kommunikations- und Navigationssystem mit selbstfahrenden LBL / USBL-Modems, das ein Netzwerk aufbauen und am MUM-Fahrzeug für den Transit und das Laden andocken kann. “
Thyssenkrupp MS baut eine kleine Version der MUM mit einer Länge von 5 m, die ab Sommer 2019 getestet werden kann. Viele der Konzepte, insbesondere die Autonomie-Software und die mobile Kommunikation, werden auf diesem System getestet. Auch die Kerntechnologien wie die neue Wasserstoffbrennstoffzelle sowie ein neues Druckkörperdesign werden in diesem Jahr in Originalgröße getestet.
Ab 2020 soll ein echtes MUM-Fahrzeug gebaut werden, mit Tests und Erprobungen bis 2023-24. Die Entwicklung wird von einem Beratungsgremium aus der Öl- und Gasindustrie unterstützt, zu dem der Betreiber Equinor, das seismische Unternehmen PGS und der Unterwasserunternehmer Boskalis gehören.
Das Unternehmen lässt auch ATLAS ELEKTRONIK, die Technische Universität Berlin und die Universität Rostock an dem Projekt, der Steuerung bzw. der Systemsimulation arbeiten.
Hydrothermalquellen unter dem Meeresspiegel in der Kalmenzone entdeckt

Das Eis brechen in der Arktisforschung

Tiefer graben: Herausforderungen und Trends in der Baggerindustrie

Die Saat der Inspiration säen: Seegras-Wiederherstellung

Von der Unsicherheit zum Vorteil: WHOI startet neue Initiativen für Industriepartner

O-Ring-Dichtungskonstruktion, Teil 2: Radialdichtungen für Außendruck
")
Skalierung der unbemannten Flotte: Von einzelnen Schiffen bis hin zu Operationen auf Systemebene

Forschungsteam des Schmidt Ocean Institute entdeckt 31 neue Arten

AUKUS entwickelt unbemannte Unterwasserfahrzeuge, Auslieferung geplant für 2027

Vard erhält Rekordauftrag über 800 Millionen Dollar für Tiefseeforschungsschiff
")
Ørsted und PGE errichten erste Fundamente für den Offshore-Windpark Baltica 2 in Polen.
-170484 "(Bildnachweis: Van Oord)")
MTR100: Profiling führender Unternehmen der Unterwassertechnik – Bewerbung geöffnet
