Neue Routen Unterwasser fliegen

Bilder: Modus Meeresbodenintervention

Bilder: Modus Meeresbodenintervention

Bilder: Modus Meeresbodenintervention
Modus Seabed Intervention Limited mit Sitz in North East England ist ein relativ kleines Unternehmen, aber seine Ziele sind ehrgeizig und fokussiert. Elaine Maslin berichtet.
Nach vier Jahren Entwicklung eines hybriden AUV / ROV (HAUV) auf der Grundlage eines modifizierten Saab Sabertooth AUV-Systems hat Modus Seabed Intervention jetzt seinen zweiten Sabertooth mit Tiefwasserbewertung erworben, der diesen Sommer ausgeliefert wird.
Die Akquisition des neuesten Sabertooth mit einer Gesamtlänge von 3.000 Metern wird es dem Unternehmen ermöglichen, seine Erfolgsbilanz weiter auszubauen und Fahrzeuge mit verbesserter künstlicher Intelligenz und Autonomie anzubieten.
Die Vision des Unternehmens ist es, dass seine HAUV-Anlagen Infield an Offshore-Standorten für Öl und Gas sowie für erneuerbare Energien, einschließlich Windparks, unabhängig von Serviceschiffen betreiben. Dies kann über ein Oberflächeneinsatzsystem oder über eine Unterwasser-Garage / Dockingstation erfolgen, von der aus das Fahrzeug ein- und ausfliegen kann. Von den Andockeinrichtungen aus kann das Fahrzeug als AUV (ohne Halteseil) mit Bordbatterien betrieben werden. Wenn eine direkte Steuerung erforderlich ist, kann es wie ein ROV entweder über ein Glasfaserseil (was sehr lange Strecken ermöglicht) betrieben werden. oder mittels einer vollen Kraft und Kontrolle Nabelschnur.
Die Dockingstation wird nicht von einem dedizierten Hilfsschiff aus eingesetzt, sondern von einem Schiffskran auf dem Meeresboden aufgestellt. Ziel ist es, ein Schiff einzusetzen, das bereits an einem bestimmten Ort im Einsatz ist, beispielsweise ein Versorgungsschiff, ein DSV oder ein Offshore-Serviceschiff für erneuerbare Energien. Der HAUV kann dann unabhängig von der Hauptaktivität des Schiffes Inspektionen und / oder Vermessungen durchführen und so die Kosten senken. Der HAUV kehrt nach Beendigung des Arbeitsumfangs in sein Dock zurück und wartet zu einem geeigneten Zeitpunkt auf seine Wiederherstellung. "Wenn Sie beispielsweise ein Schiff für einen Plattformversorgungslauf eingesetzt haben, können Sie den HAUV auf dem Hinweg absetzen und auf dem Rückweg abholen, nachdem er seine vorgegebene Aufgabe erfüllt hat", sagt Nigel Ward, Modus 'Chief Commercial Officer. Basierend auf der Batteriekapazität des aktuellen HAUV von Modus können Umfragen mit einer Länge von 60 km mit einer einzigen autonomen Ladung durchgeführt werden, wobei die Umfragezeit von Geschwindigkeit und Nutzlast abhängt.
Der Hintergrund von Modus liegt in Unterwassergraben. Als das Unternehmen in neue Technologien investieren wollte, hatte es den Eindruck, dass der ROV-Markt ausgereift war, wenn nicht gesättigt. Daher suchte Modus nach Diversifizierung und erwarb einen AUV von Remus, um Vermessungs- und Inspektionsdienste mit geringeren Kosten von bereits vorhandenen Schiffen bereitzustellen arbeiten. Die Absicht war, Schiffe zurückzulehnen und die Remus gehen zu lassen, um ihre Arbeit zu erledigen, während das Schiff seine Hauptaufgabe fortsetzte (anstatt ein ROV zu verwenden, ein ROV-Hilfsschiff zu binden). Die Vorteile wurden als reduzierende menschliche Fehler angesehen Erleichterung von Offshore-Projekten, Halten qualifizierter Mitarbeiter an Land, Senkung der Kosten und Erhöhung der Sicherheit.
Der Remus war nicht das richtige Fahrzeug für die Aktivitäten, an denen Modus beteiligt war. Es gab ein Side-Scan-Sonar, aber die Kunden wünschten sich Bathymetrie, und wie viele andere AUV-Systeme war es schwierig, das Fahrzeug zu modernisieren oder Sensoren für verschiedene Anwendungen auszutauschen “, so Ward. "In jedem Fall sind die auf dem Markt vorhandenen AUVs eigentlich nicht so autonom. Das Schiff muss das Fahrzeug während eines Bereichs überwachen, der in unseren Augen das Objekt der autonomen Funktion besiegt."
 Bilder: Modus Meeresbodenintervention
Bilder: Modus Meeresbodenintervention
Also sah Modus auf Saab Seaeyes Sabertooth. „Es ist eine Kreuzung zwischen einem ROV und einem AUV. Wir wollten die Vorteile beider. Die schnelle und einfache Installation einer flexiblen Vermessungssensor-Nutzlast ist entscheidend für die Anforderungen der Kunden. Wir können einen Sensor mieten, integrieren und los geht's.
Im Moment werden so viele neue Vermessungstechnologien entwickelt, daher wollten wir sicherstellen, dass wir sie einsetzen können, um das Fahrzeug zukünftig zukunftssicher zu machen.
„Wir wollten auch wie ein ROV schweben, die Geschwindigkeit eines AUV haben und wirklich autonome Operationen ausführen können, so dass Sie kein Boot für die Verfolgung des HAUV mit einem ultrakurzen Basissystem einsetzen müssen . Wir hatten das Gefühl, dass der Saab Sabertooth diese Kriterien erfüllt.
„Das Fahrzeug stützt sich im Basispaket auf sein IXBlue Phins3 INS und RDI-Arbeitspferd DVL mit Datenerfassung, Navigation und Verarbeitung von Sensordaten, die von QINsy verwaltet werden, wobei auch Novatel DGPS-Daten erfasst werden. Die Nutzlast ist jedoch flexibel und kann auch innerhalb von Arrays mit langer Grundlinie (LBL) oder bei Bedarf mit einem USBL-System verwendet werden, wobei ein Sonardyne AvTrak 6 einen Wandler, einen Transceiver und eine Telemetrieverbindung in einem Gerät bietet “, so Ward.
Im Jahr 2017 führte das Unternehmen Demonstrationen und Erprobungen durch, und der HAUV war 2018 für den kommerziellen Betrieb bereit. In einem der Versuchsprojekte im Jahr 2017 wurde der HAUV von einem Kai an einem See in der Nähe der schwedischen Saab-Anlage in Betrieb genommen, um ein „Mähen“ durchzuführen Bei der vorprogrammierten Erhebung des Rasens werden MBES-, SSS- und SBP-Daten über eine etwa 15 km lange Strecke erfasst, ohne dass ein Hilfsschiff von außen unterstützt wird (nur DGPS, INS und DVL des Fahrzeugs). "Nachdem wir die Umfrage wiederholt hatten, sah es sehr wenig Drift", sagt Ward. Das Fahrzeug wurde auch mehrmals erfolgreich getestet, wobei es autonom in seiner Unterwasser-Garage angedockt wurde. Anfang 2018 wurde diese Funktion im Rahmen eines von Innovate UK finanzierten Projekts zur Inspektion von Windparkbewohnern weiterentwickelt. Diese Studie wurde in der ORE-Catapult-Anlage in Blyth durchgeführt und beinhaltete auch die indirekte Leistungskopplung und Datenübertragung unter Verwendung eines induktiven Verbinders von Blue Logic.
In der Endphase dieses finanzierten Demonstratorprojekts wird das Unternehmen im Laufe des Jahres zwischen seinen kommerziellen Verpflichtungen ein internes Hybrid-AUV-Konzept in einem Offshore-Windpark in Großbritannien testen. Der HAUV und seine Dockingstation werden zu einer Mission abgesetzt, ähnlich einer Demonstration in der ORE-Anlage in Blyth. Bei dieser Gelegenheit wird keine Schnittstelle mit der Windparkinfrastruktur hergestellt. "Die Dockingstation an einen Windpark anzuschließen, auf Strom und Kommunikation zuzugreifen, wäre jedoch relativ unkompliziert", sagt Ward, "da bereits eine Strom- und Dateninfrastruktur für die Arbeit an den Turbinen vorhanden ist, die wir nutzen können."
 Bilder: Modus Meeresbodenintervention
Bilder: Modus Meeresbodenintervention
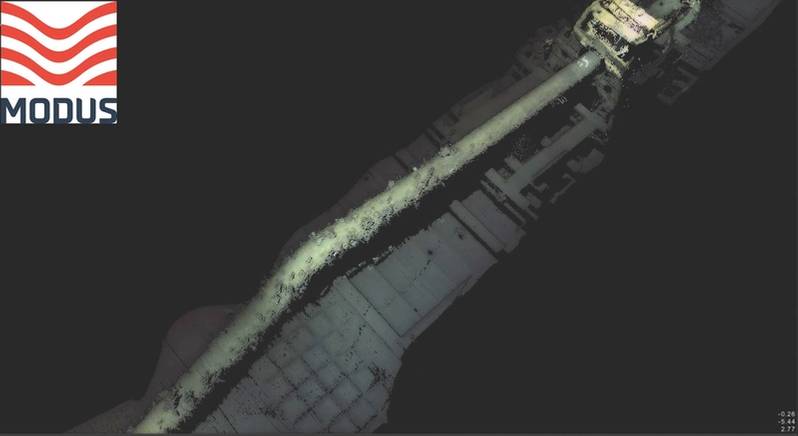
Letztes Jahr setzte Modus einen HAUV Offshore NW Australia ein, um rund 240 km Pipeline-Integritätsuntersuchung durchzuführen. Dabei wurden sowohl atemberaubende Bilder als auch Punktwolkendaten sowohl der Pipeline als auch des vorbeifahrenden Meereslebens produziert (siehe Abbildung mit Details der Haifischzähne bei 2knts) mit einem Cathx Scout Laser-Profiling und HD-Bildgebung neben einem Multibeam-Echolot (MBES).
Die Umfragezeit war die Hälfte der Zeit, die ein herkömmliches ROV zur Durchführung der Umfrage benötigt hätte, und es hätte schneller sein können “, sagt Ward. "Eine solche Befragung ist ohne Leine möglich, wurde jedoch bei dieser Gelegenheit mit Leine durchgeführt, um Echtzeitdaten zu sammeln."
Für die Navigation benutzte das Fahrzeug USBL-Hilfsmittel, um eine Liste der Routenpositionen aus bereits erstellten Diagrammen der Pipeline zu verfolgen. Dies kann mit dem autonomen Pipe-Tracking-Algorithmus kombiniert werden, der die für das MBES erfassten Pipe-Profildaten verwendet, um die Pipe-Route zu verfolgen. Dies ist besonders hilfreich, wenn die bauliche Position nicht genau ist. Dies kann durch Ungenauigkeiten verursacht werden, die durch Positionstoleranzen verursacht werden. „Aufgrund dieser Systeme kann der AUV die Pipeline tatsächlich sehen. Dies bedeutet, dass für die Durchführung einer Pipeline-Inspektion nicht immer USBL-Hilfsmittel erforderlich sind, um einen autonomen Betrieb außerhalb der Unterstützungsschiffe zu ermöglichen“, sagt Ward. „Das CathX-Lasersystem liefert eine Punktwolke mit sehr hoher Auflösung der Pipeline und des angrenzenden Meeresbodens. Die Laser- und MBES-Punktwolken wurden in der Nachbearbeitung kombiniert und zur Beurteilung der Position und der möglichen freien Zeitspannen verwendet. Die sehr hohe Auflösung des Lasersystems macht es für Spulenablenkung und andere photogrammetrische Vermessungen geeignet. “
Da das Fahrzeug stabil und leise ist und in einer konstanten Höhe über der Pipeline fliegen kann, sind Bilder und Messwerte, die aus lasergestützten Punktwolken erstellt und mit HD-Kamerabildern zusammengenäht sind, sehr genau und einfach zu verarbeiten.
Einer der Märkte, auf die Modus abzielt, ist Offshore-Wind. Die Felder von Turbinenfeldern befinden sich häufig in Hochstromgebieten. Daher testete das Unternehmen 2017 seinen HAUV in einem Wasserkraftwerk in Schweden, in dem das 4,5-t-fähige Fahrzeug seine Fähigkeit unter Beweis stellte, seine Position bei 3-ts-Strom erfolgreich zu halten. An Offshore-Windstandorten werden häufig Wartungsschiffe eingesetzt, die zu Wartungszwecken vor Ort eingesetzt werden. Dies sind praktisch Hotelboote mit viel Zeitaufwand. Wir haben den HAUV entwickelt, um von diesen Schiffen eingesetzt und geborgen zu werden, was im Wesentlichen die Notwendigkeit ersetzt, ein ROV-Schiff für Inspektionsaktivitäten zu mobilisieren. Dadurch wird das Serviceschiff wertvoller.
Bei Modus geht es nicht nur um visuelle Inspektion. Das Unternehmen hat auch das FIGs-System von Force Technology getestet, das neben der GVI-Umfrage neben 4knts berührungslose kathodische Schutzuntersuchungen durchführen kann.
„Saab hat ein robustes Unterwasserfahrzeug entwickelt, und wir haben es weiterentwickelt, damit es als führendes Vermessungs- und Inspektionsfahrzeug der Klasse betrieben werden kann“, sagt Ward. „Wir haben uns darauf konzentriert, wie die Sensoren integriert sind, wie sie miteinander kommunizieren, Missionssoftware, und wir setzen jetzt auf künstliche Intelligenz und maschinelles Lernen. Wir können bereits sagen: Gehen Sie hier hin, wenn Sie eine Pipeline sehen, folgen Sie ihr, oder wenn Sie ein Monopile sehen, führen Sie eine Inspektion entlang des Umfangs durch. Dies wurde alles in Versuchen gezeigt. Die nächsten autonomen Entwicklungen werden sehr aufregend sein. Kurzfristig wollen wir das HAUV-Gleis entwickeln und vergrabene Kabel autonom überwachen. Derzeit werden verschiedene Pipe-Tracking-Technologien getestet. Es wird erwartet, dass dies eine schnelle Entwicklung sein wird, da wir ähnliche Algorithmen verwenden können, die zum Verfolgen von sichtbaren Pipelines verwendet werden. “
Es war keine einfache Reise, aber Ward sieht, dass einige das Potenzial sehen. "Es steht außer Frage, dass wir mit der Markteinführung dieser Technologie vor Herausforderungen standen", sagt er. „In erster Linie wollen viele Unternehmen ihre Operationen so fortsetzen, wie sie es immer getan haben, zum Beispiel geben einige Betreiber immer noch ROV- und Boom-Kameras für die Pipeline-Inspektion vor. Kunden, die diesen HAUV angenommen haben und einen etwas anderen Ansatz zur Bewältigung der GVI benötigen, haben die Vorteile der Kosteneinsparung und der verbesserten Datenqualität genutzt.
„HAUV ist seit fast einem Jahr voll kommerziell einsatzfähig, hat eine wachsende Erfolgsgeschichte und wir sind sehr erfreut über die weiteren Optimierungen und Funktionen, die wir in den kommenden Monaten in Betrieb nehmen wollen, und zusätzlich unseren zweiten HAUV in der Flotte willkommen heißen in ein paar Monaten. "
Tiefer graben: Herausforderungen und Trends in der Baggerindustrie

Die Saat der Inspiration säen: Seegras-Wiederherstellung

Von der Unsicherheit zum Vorteil: WHOI startet neue Initiativen für Industriepartner

O-Ring-Dichtungskonstruktion, Teil 2: Radialdichtungen für Außendruck
")
Skalierung der unbemannten Flotte: Von einzelnen Schiffen bis hin zu Operationen auf Systemebene

Forschungsteam des Schmidt Ocean Institute entdeckt 31 neue Arten

AUKUS entwickelt unbemannte Unterwasserfahrzeuge, Auslieferung geplant für 2027

Vard erhält Rekordauftrag über 800 Millionen Dollar für Tiefseeforschungsschiff
")
Ørsted und PGE errichten erste Fundamente für den Offshore-Windpark Baltica 2 in Polen.
-170484 "(Bildnachweis: Van Oord)")
MTR100: Profiling führender Unternehmen der Unterwassertechnik – Bewerbung geöffnet

Nordatlantische Glattwale verzeichnen in dieser Kalbungssaison die höchste Geburtenzahl seit 2009
-mit-der-170206 "Nordatlantischer Glattwal „Millipede“ (Katalognummer 3520) mit ihrem Kalb in der Cape Cod Bay am 9. April 2026. Bildnachweis: New England Aquarium, aufgenommen mit Genehmigung der NOAA (Nr. 25739-01).")
Lineup Oceans SURFREEF-Projekt in Palavas-les-Flots
